
Bisher haben sich Wissenschaftler und Ingenieure bei der Entwicklung weicher Roboter, die von lebenden Organismen inspiriert wurden, auf lebende, moderne Beispiele konzentriert. Beispielsweise haben wir zuvor über Anwendungen weicher Robotik berichtet, die Tintenfische, Heuschrecken und Geparden nachahmen. Allerdings hat ein Forscherteam nun erstmals die Prinzipien der Soft-Robotik und der Paläontologie kombiniert, um eine Soft-Roboter-Version eines Pleurocystitiden zu bauen, eines uralten Meeresbewohners, der vor 450 Millionen Jahren existierte.
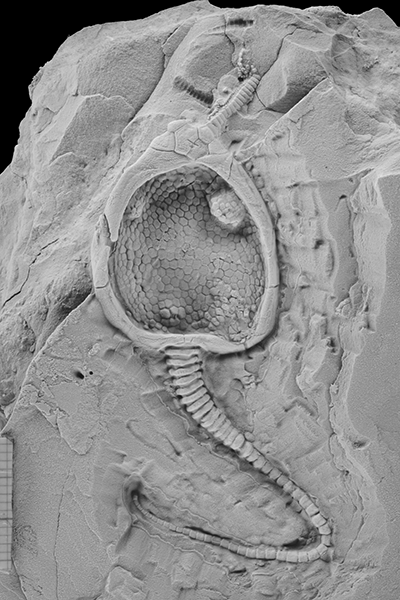
Pleurozystiden sind mit modernen Stachelhäutern wie Seesternen und Schlangensternen verwandt. Der Organismus hat in der Evolution eine große Bedeutung, weil man davon ausgeht, dass er so ist Die ersten Stachelhäuter Er war bewegungsfähig: Er benutzte einen muskulösen Rumpf, um sich auf dem Meeresboden fortzubewegen. Aber aufgrund des Mangels an fossilen Beweisen haben Wissenschaftler… Nicht klar verstanden Wie nutzte der Organismus den Rumpf, um sich unter Wasser fortzubewegen? „Obwohl seine Lebensgewohnheiten und seine Körperhaltung einigermaßen gut verstanden sind, sind die Mechanismen, die seine Rumpfbewegung steuern, höchst umstritten“, sagten die Autoren einer zuvor veröffentlichten Studie, die sich auf den Rumpf von Stachelhäutern konzentrierte. Hinweis:.
Die neu entwickelte Soft-Roboter-Nachbildung (auch „Rhombus“ genannt) eines Stachelhäuters hat es Forschern ermöglicht, die Bewegung des Organismus und verschiedene andere Geheimnisse im Zusammenhang mit der Entwicklung des Stachelhäuters zu entschlüsseln. In ihrer Studie behaupten sie auch, dass die Replik als Grundlage für die Paläontologie dienen wird, ein relativ neues Gebiet, das weiche Robotik und fossile Beweise nutzt, um biomechanische Unterschiede zwischen Lebensformen zu erforschen.
Erstellen Sie eine Nachbildung des Soft-Roboters
Es gibt viele Gründe, warum Wissenschaftler nicht versuchen, eine weiche Roboterversion von etwas zu entwickeln, das so ausgestorben und so alt ist wie die Rippenfellentzündung. Es ist schwer zu verstehen, wie sich ein Organismus bewegt, da es kein modernes Gegenstück gibt. Darüber hinaus liefern Fossilien nur begrenzte Informationen darüber, wie sich ein Organismus bewegte. Während einige Forscher beispielsweise vermuten, dass Pleurocystis-Bakterien schwimmen, Andere argumentieren Sie zeigten Ruder- oder Sinusbewegungen.
Um diese Herausforderungen zu meistern, arbeiteten die Forscher mit Paläontologen zusammen, die auf Stachelhäuter spezialisiert sind. Sie sammelten Fossilienbilder, CT-Scans und alle anderen Beweise, die sie finden konnten, und nutzten diese Daten dann, um den Körper und den Stamm des Pleurasacks zu entwerfen. Anschließend verwendeten sie Elastomerformung und 3D-Druck, um die verschiedenen Teile des Roboters basierend auf dem Design zu bauen.
Als sie versuchten, den Roboter mithilfe des Rumpfes (wie eines echten Gliedmaßes) zu bewegen, standen sie vor einer weiteren Herausforderung. „Der weiche Aktuator verwendet Nitinoldraht, eine Formgedächtnislegierung (SMA), die oft ausbrennt und sich dauerhaft ausdehnt. Dazu müssen mehrere Stiele hergestellt werden (ungefähr 100 wurden hergestellt) und ersetzt, wenn sie kaputt gehen.“
Es war auch schwierig, den weichen, muskulösen Rumpf der Pleuritis-Bakterien nachzubilden, da die Forscher keine herkömmlichen Aktuatoren verwenden konnten, die zu sperrig und starr sind. „Stattdessen mussten wir einen speziellen ‚künstlichen Muskeldraht‘ verwenden, der aus einer Nickel-Titan-Legierung besteht, der sich als Reaktion auf elektrische Stimulation zusammenzieht. Dies ermöglichte uns die Schaffung eines torsoähnlichen Motors“, fügte Carmel Majidi, leitende Autorin der Studie, hinzu und Professor für Maschinenbau an der Carnegie Mellon University. „Es entspricht der Flexibilität eines natürlichen Muskelrumpfs.“
Anschließend führten die Forscher einige Simulationen durch, um zu sehen, wie sich die Raute wahrscheinlich unter Wasser bewegen würde. Sie entdeckten, dass ein längerer Oberkörper zu besseren Bewegungen führte. Der Studie zufolge stimmte dies mit fossilen Beweisen überein, die auf die Entwicklung längerer Beine in der Pleura im Laufe der Zeit hindeuteten.
Nach dem Studium der Simulationen platzierten die Forscher den Roboter in einem 42 x 42 Zoll großen Aquarium mit einer dem Meeresboden ähnlichen Bodenoberfläche. Sie führten mehrere Tests durch, die jeweils zwei Minuten dauerten, um die Bewegung des Roboters zu untersuchen. „Wir zeigen, dass ein breiter, schwungvoller Gang für diese Stachelhäuter am effizientesten sein kann und dass eine zunehmende Rumpflänge möglicherweise zu einer deutlichen Steigerung der Geschwindigkeit bei minimalen zusätzlichen Energiekosten geführt hat.“ Hinweis: In ihrem Studium.
Studium ausgestorbener Tiere
Es klingt interessant, mithilfe der Paläontologie exakte Kopien antiker, ausgestorbener Lebewesen anzufertigen, aber was können uns Roboter sagen, was der Fossilienbestand nicht kann? Als wir Majidi diese Frage stellten, erklärte er, dass Wissenschaftler möglicherweise eine großartige Gelegenheit verpassen, die biologischen und evolutionären Prinzipien zu erlernen, die das Leben vieler anderer Lebensformen bestimmen, wenn sie sich nur auf Roboter konzentrieren, die von existierenden Arten inspiriert sind.
Einer Schätzung zufolge gehören dazu beispielsweise moderne Organismen Nur 1 Prozent Von allen Lebensformen, die jemals auf der Erde existiert haben. „Wir können anfangen, von den 99 Prozent der Arten zu lernen, die einst auf der Erde lebten, statt nur von einem Prozent. Es gibt viele Lebewesen, die Millionen von Jahren lang erfolgreich waren, aber aufgrund drastischer Veränderungen in ihrer Umwelt ausgestorben sind“, sagte Majidi Ars Technica.
Weiche Roboternachbildungen solcher Kreaturen bieten Paläontologen ein leistungsstarkes Werkzeug zur Schaffung experimenteller Testplattformen zur Untersuchung von Hypothesen darüber, wie sich diese alten Lebensformen bewegten und entwickelten.
Die aktuelle Studie zeigt erfolgreich, dass Softroboter zur „Wiederbelebung“ ausgestorbener Organismen sowie zur Untersuchung ihrer Fortbewegung und Biomechanik eingesetzt werden können. „Dies wurde in der Soft-Robotik-Community noch nie zuvor getan, und wir hoffen, dass es weitere Forschung in diesem Bereich anregen wird“, fügte Desatnick hinzu.
PNAS, 2023. DOI: 10.1073/pnas.2306580120 (Über digitale IDs)
Rupendra Brahambhatt ist ein erfahrener Journalist und Filmemacher. Er berichtet über Wissenschafts- und Kulturnachrichten und arbeitet seit fünf Jahren aktiv mit einigen der innovativsten Nachrichtenagenturen, Magazinen und Medienmarken zusammen, die in verschiedenen Teilen der Welt tätig sind.

. „Zombie-Experte. Hipster-freundlicher Internet-Evangelist. Organisator. Kommunikator. Popkultur-Fanatiker. Web-Junkie.“